
Grippers robóticos de vacío
Los grippers de vacío de Robotiq son herramientas de agarre versátiles y eficientes diseñadas para automatizar la manipulación de una amplia gama de objetos en entornos industriales.
Ventajas del uso de grippers de vacío
- Agarre preciso de superficies
- Plug & Play
- Fácil programación
- Operación Silenciosa
- Sistema de vacío integrado
- Potencia de succión
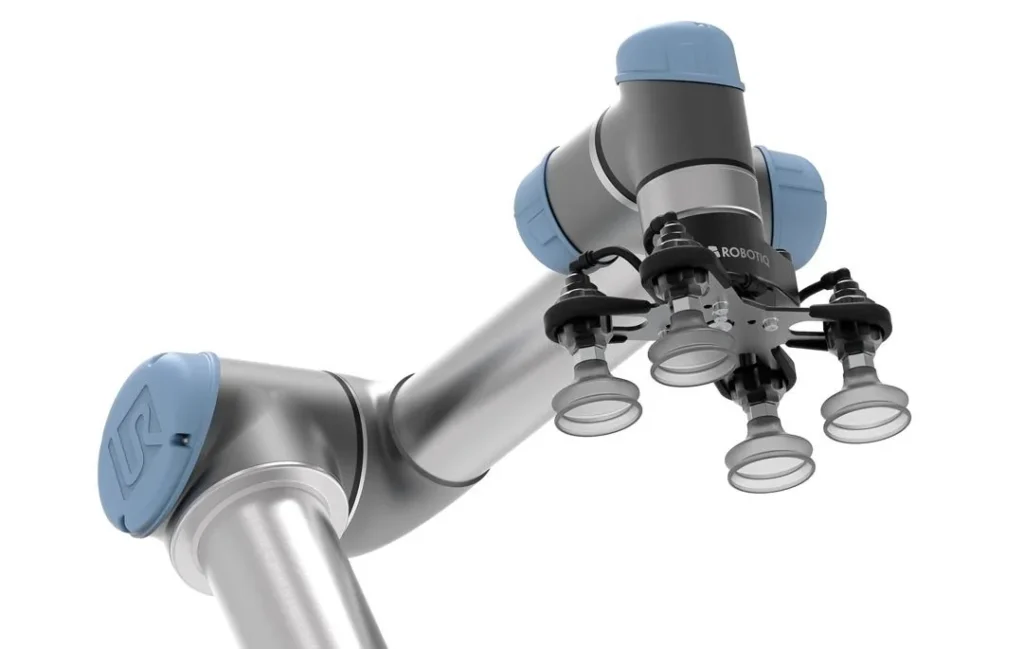
Grippers de vacío para brazos robóticos
Los grippers de vacío de Robotiq revolucionan la automatización de la manipulación de objetos en entornos industriales. La tecnología de vacío adaptable permite un agarre firme y seguro de una amplia gama de objetos, desde piezas delicadas hasta componentes pesados.
Su diseño modular y escalable se adapta a diversas necesidades y aplicaciones, mientras que su control preciso y flexible facilita la integración con robots colaborativos.